
ukf
Run one update of a basic unscented (sigma point) Kalman filter. The advantage of a UKF over a traditional extended Kalman filter is that the UKF can be more accurate when the propagation/measurement functions are not zero-mean wrt the error (that is, they are significantly nonlinear in terms of their errors). Further, since a UKF doesn't require Jacobians, it's often easier to use a UKF than an EKF. The disadvantage is increased runtime. Though a UKF operates "on the order" of an EKF, in implementation it often takes several times longer.
[x_k, P_k, P_xc_k] = ukf( ...
t_km1, t_k, x_km1, P_km1, u_km1, z_k, ...
f, h, Q_km1, R_k, ...
alpha, beta, kappa, ...
P_cc, P_xc_km1, ...
(etc.))Inputs
t_km1 | Time at sample k-1 |
|---|---|
t_k | Time at sample k |
x_km1 | State estimate at sample k-1 |
P_km1 | Estimate covariance at sample k-1 |
u_km1 | Input vector at sample k-1 |
z_k | Measurement at sample k |
f | Propagation function with interface: where |
h | Measurement function with interface: where |
Q_km1 | Pocess noise covariance at sample k-1 |
R_k | Measurement noise covariance at sample k |
alpha | Optional tuning parameter, often 0.001 |
beta | Optional tuning parameter, with 2 being optimal for Gaussian estimation error |
kappa | Optional tuning parameter, often 3 - |
P_cc | Optional consider covariance (presumed constant) |
P_xc | Optional state-consider covariance at k-1 |
(etc.) | Additional arguments to be passed to |
Outputs
x | Upated estimate at sample k |
|---|---|
P | Updated estimate covariance at sample k |
P_xc | When using consider covariance (P_cc and P_xc), this is the updated covariance between the state and consider parameters at sample k. |
Example
We can quickly create a simulation for discrete, dynamic system, generate noisy measurements of the system over time, and pass these to an unscented Kalman filter.
First, define the discrete system.
rng(1);
dt = 0.1; % Time step
F_km1 = expm([0 1; -1 0]*dt); % State transition matrix
G_km1 = [0.5*dt^2; dt]; % Process-noise-to-state map
Q_km1 = G_km1 * 0.5^2 * G_km1.'; % Process noise variance
R_k = 0.1; % Meas. noise covarianceMake propagation and observation functions. These are just linear for
this example, but ukf is meant for nonlinear functions.
f = @(t0, tf, x, u, q) F_km1 * x + q;
h = @(t, x, u, r) x(1) + r;Now, we'll define the simulation's time step and initial conditions. Note that we define the initial estimate and set the truth as a small error from the estimate (using the covariance).
n = 100; % Number of samples to simulate
x_hat_0 = [1; 0]; % Initial estimate
P = diag([0.5 1].^2); % Initial estimate covariance
x_0 = x_hat_0 + mnddraw(P, 1); % Initial true stateNow we'll just write a loop for the discrete simulation.
% Storage for time histories
x = [x_0, zeros(2, n-1)]; % True state
x_hat = [x_hat_0, zeros(2, n-1)]; % Estimate
z = [x_0(1) + mnddraw(R_k, 1), zeros(1, n-1)]; % Measurement
% Simulate each sample over time.
for k = 2:n
% Propagate the true state.
x(:, k) = F_km1 * x(:, k-1) + mnddraw(Q_km1, 1);
% Create the real measurement at sample k.
z(:, k) = x(1, k) + mnddraw(R_k, 1);
% Run the Kalman correction.
[x_hat(:,k), P] = ukf((k-1)*dt, k*dt, x_hat(:,k-1), P, [], z(:,k), ...
f, h, Q_km1, R_k);
endPlot the results.
figure(1);
clf();
t = 0:dt:(n-1)*dt;
plot(t, x, ...
t, z, '.', ...
t, x_hat, '--');
legend('True x1', 'True x2', 'Meas.', 'Est. x1', 'Est. x2');
xlabel('Time');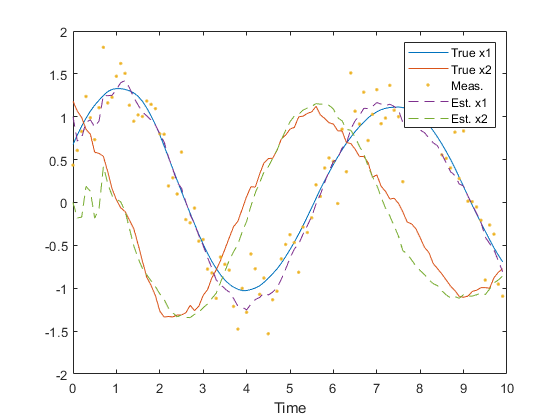
Note how similar this example is to the example of lkf.
Reference
Wan, Eric A. and Rudoph van der Merwe. "The Unscented Kalman Filter." Kalman Filtering and Neural Networks. Ed. Simon Haykin. New York: John Wiley & Sons, Inc., 2001. Print. Pages 221-276.
See Also
*kf v1.0.3 January 17th, 2025
©2025 An Uncommon Lab