
lkf
Run one step of a linear Kalman filter for a discrete linear system described by:
x_k = F_km1 * x_km1 + F_u_km1 * u_km1 + w_q
z_k = H_k * x_k + w_rwhere km1 means k-1, w_q is a zero-mean Gaussian random variable
with zero mean and covariance Q_km1. That is, w_q ~ N(0, Q_km1).
Similarly, w_r ~ N(0, R_k).
It updates a state estimate and covariance from sample k-1 to sample k.
[x_k, P_k] = lkf(x_km1, P_km1, u_km1, z_k, ...
F_km1, F_u_km1, H_k, Q_km1, R_k);Inputs
x_km1 | State estimate at sample k-1 |
|---|---|
P_km1 | State estimate covariance at sample k-1 |
u_km1 | Input vector at sample k-1 |
z_k | Measurements at sample k |
F_km1 | State transition matrix at sample k-1 |
F_u_km1 | Input-to-state-update matrix for sample k-1 |
H_k | Observation matrix at sample k |
Q_km1 | Process noise at sample k |
R_k | Measurement noise at sample k |
Outputs:
x_k | Updated state estimate for sample k |
|---|---|
P_k | Updated state covariance for sample k |
Example
We can quickly create a simulation for discrete, dynamic system, generate noisy measurements of the system over time, and pass these to a linear Kalman filter.
First, define the discrete system.
rng(1);
dt = 0.1; % Time step
F_km1 = expm([0 1; -1 0]*dt); % State transition matrix
H_k = [1 0]; % Observation matrix
Q_km1 = 0.5^2 * [0.5*dt^2; dt]*[0.5*dt^2 dt]; % Process noise covariance
R_k = 0.1; % Meas. noise covarianceNow, we'll define the simulation's time step and initial conditions. Note that we define the initial estimate and set the truth as a small error from the estimate (using the covariance).
n = 100; % Number of samples to simulate
x_hat_0 = [1; 0]; % Initial estimate
P = diag([0.5 1].^2); % Initial estimate covariance
x_0 = x_hat_0 + mnddraw(P, 1); % Initial true stateNow we'll just write a loop for the discrete simulation.
% Storage for time histories
x = [x_0, zeros(2, n-1)]; % True state
x_hat = [x_hat_0, zeros(2, n-1)]; % Estimate
z = [H_k * x_0 + mnddraw(R_k, 1), zeros(1, n-1)]; % Measurement
% Simulate each sample over time.
for k = 2:n
% Propagate the true state.
x(:, k) = F_km1 * x(:, k-1) + mnddraw(Q_km1, 1);
% Create the real measurement at sample k.
z(:, k) = H_k * x(:, k) + mnddraw(R_k, 1);
% Run the Kalman correction.
[x_hat(:, k), P] = lkf(x_hat(:, k-1), P, [], z(:, k), ...
F_km1, [], H_k, Q_km1, R_k);
endPlot the results.
figure(1);
clf();
t = 0:dt:(n-1)*dt;
h = plot(t, x, ...
t, z, '.', ...
t, x_hat, '--');
legend('True x1', 'True x2', 'Meas.', 'Est. x1', 'Est. x2');
xlabel('Time');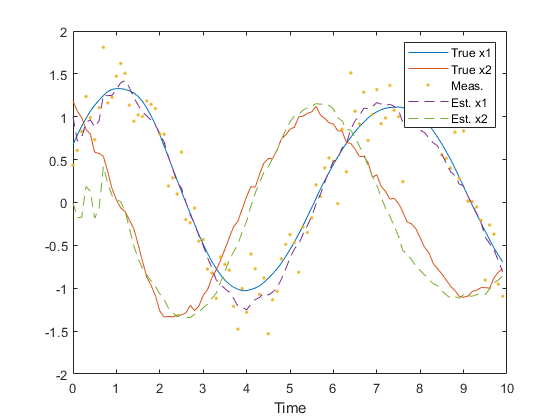
See Also
*kf v1.0.3 January 17th, 2025
©2025 An Uncommon Lab